Vipps et valgfritt beløp til (+47) 94 83 29 52, Morten Andreas Myrstad, for det DU føler heftet er verdt. (100% valgfritt)
1 Følger og rekker
Definisjon tallfølge
En (tall)følge er en oppramsning av tall.
Hvis oppramsningen innholder n tall, der n∈N
er følgen endelig. Ellers er den uendelig.
Forskjellige typer følger.
Vanligvis navngis følger på denne måten
{an}
Rekursive følger{rn} er definert ved blant annet rn+2=rn+1+rn
Kjent eksempel er fibbonacci følgen som bruker formelen over med start tallene 0 og 1
Ekplisitte rekker, eksempel for {en} en=2n
Kjennetegnes ved at den er uavhengig av forrige tall i følgen
Definisjon rekke
En rekke er summen av en følge. Eksempel:
an=3n−1
For de fire første tallene i følgen har vi
a1=30=1a2=31=3a3=32=9a4=33=27
Summen av de fire første tallene danner rekka
s4=1+3+9+27=40
Summen av de n første leddene
Summen av de n første leddene i en rekke kan vi skrive slik:
sn=a1+a2+a3+⋯+an=i=1∑nai
sn betyr summen av de n første tallene
Som er summen av alle tallene i rekken (her mellom = og =)
Som også kan skrives med summasjonstegnet ∑
Aritmetisk rekke
d er distansen mellom tallene
an+1=an+d⟺an=a1+(n−1)d
Summen av endelig aritmetisk rekke
Summen av en endelig aritmetisk rekke
sn=2a1+an⋅n
Regn ut rekken 1+2+3+4+5+6+⋯+100
Klart dette er ikke gjort på 1-2-3, så vi må finne en smartere løsning.
Vi starter med summen av tallene fra 1 til 10... Finner vi en sammenheng?
Vel det er mange måter å tenke seg til en slags gruppering som en forklaring av formelen.
(1+10)+(2+9)+(3+8)+(4+7)+(5+6) 11+11+11+11+11 (1+10)⋅10/2=55
Geometrisk rekke
k er koeffisienten mellom tallene
an+1=an⋅k⟺an=a1⋅kn−1
Summen av n første i en geometrisk rekke
sn=a1⋅k−1kn−1fork=1
Kovergerende rekke
Sum av kovergent rekke
En geometrisk rekker konvergerer dersom:
−1<k<1
I en konvergent rekke er summen definert:
s=1−ka1
Summen av en uendelig rekke (som konvergerer) kan skrives som
s=n→∞limsn
Benytter summen av geometrisk rekke, og at rekken er geometrisk til å finne
s=n→∞lima1⋅k−1kn−1der−1<k<1s=k−1−a1s=1−ka1
Variable kvotienter og konvergensområde (s.62)
En geometrisk rekke konvergerer dersom −1<k(x)<1
Eksempel på konvergensområde
Finn konvergensområde til
s(x)=3+3(2x−1)+3(2x−1)2+3(2x−1)3+…
Først finner vi at k(x)=2x−1, må derfor løse −1<k(x)<1−1<2x−1<1−1+1<2x−1+1<1+10<2x<20<x<1x∈⟨0,1⟩
Induksjonsbevis
Det er en naturlig tanke å tenke at hvis noe er sant for en ting, og den neste, og den neste, og den neste, ... så må utsagnet være sant for alle de neste tallene.
Dette er det bærende beviset for induksjonsbevis. Konkret må de bevise dette:
Utsagnet er sant for n=1
Hvis utsagnet er sant for et vilkåerlig naturlig tall, så er det også sant for det neste naturlige tallet
Eksempel på induksjonsbevis
Bevis med induksjon at
1+2+3+⋯+n=2n(n+1)
Først sjekker vi om dette stemmer for første mulige tilfelle, n=1
1=21(1+1)som er sant
Vi vet derfor at det stemmer for n=1 (første steget)
Så må vi bevise at formelen stemmer for et vilkåerlig tall n=k
1+2+3+⋯+k=2k(k+1)
samt n=k+1 som vil gi formelen
1+2+3+⋯+k+(k+1)=2(k+1)((k+1)+1)
Bruker derfor antagelsen 1+2+3+⋯+k=2k(k+1)2k(k+1)+(k+1)=1+2+3+⋯+k+(k+1)=2k(k+1)+(k+1)=2k(k+1)+22(k+1)=2k(k+1)+2(k+1)=2(k+1)(k+2)=2(k+1)((k+1)+1)
Vi ser at formelen vi sitter igjen med etter et at vi bestemte n=k+1 og formelen vi fikk med antagelsen + (k+1) er den samme. Derfor har vi bevist steg 2 fordi utsagnet er sant for et tilfelig naturlig tall og det neste naturlige tallet etter det igjen. Derfor stemmer utsagnet for ALLE naturlige tall.
Induksjonsbevis
Vi kan korte ned formuleringen av beviset. Vi ønsker å bevise at utsag P(n) er sant for alle naturlige tall.
Vis at P(1) er sant
Vis at hvis P(k) er sant for et naturlig tall k, er også P(k+1) sannt.
Da sier induksjonsbeviset at utsagnet P(n) er sant for alle naturlige tall n.
Slutt- og nåverdier
Sluttverdi
Anta 1000kr på en konto me rente på 2% stå urørt i fem år:
1000kr ⋅ 1,025 = 1104,08kr
Altså er sluttverdien på 1000 kr etter 5 år 1104 kr.
Nåverdi
Vi tar for oss samme eksmepel, bare vi ønsker å sette pengene på konto om 5 år.
x kroner som vil blir 1000kr om 5 år finner vi med likningen. x ⋅ 1,025 = 1000
Den gir x = 905,73
Altså er 906 kr nåverdien til 1000 kr om fem års tid.
Annuitetslånseksempel
Annuitetslån
Morten må låne 2 000 000 kr med en rente på 3% skal han nedbetale lånet på 20 år med like store nedbetalinger per år. Hvor stor er den årlige nedbetalingen?
Han bruker følgene formel:
x⋅1,03−11,0320−1=2000000⋅1,0320
Og finner at x = 134 431,42 kr med en kalkulator
H.S. beskriver nåverdien av lånet, altså hva 2 000 000 kr med 3% rente over 20 år er verdt i dagens valuta.
V.S. bruker summen (s20) av en geometrisk rekke for å finne ut av hva x (a1)
Grunnen for at disse er likestilte er at nåverdien må være lik summen av alle innbetalingene, for at lånet skal gå i 0.
2 Integrasjon
Det bestemte integralet
∫abf(x)dx
Der a, b og f(x) er/gir reelle tall.
Beskriver arealet av funksjonen hvis f(x) kun er positiv fra a til b
Det bestemte integralet definert av riemannsummer
∫abf(x)dx=n→∞limi=1∑n(f(xi∗))⋅Δx, der Δx=nb−a
Rektangelmetoder
Rektangelmetode med venstretilnærming
∫abf(x)dx≈i=1∑nf(xi−1)⋅Δxderxi−1=a+(i−1)⋅Δx
Rektangelmetode med høyretilnærming
∫abf(x)dx≈i=1∑nf(xi)⋅Δxderxi=a+i⋅Δx
Rektangelmetode med midtpunkttilnærming
∫abf(x)dx≈i=1∑nf(mi)⋅Δxdermi=a+(i−21)⋅Δx
Trapesmetoden
Ligner midtpunkttilnærming, bare du tar gjennomsnittet av venstre og høyre side per Δx.
Forklaring trapesmetoden
∫abf(x)dx≈2Δx(f(a)+f(b)+2⋅i=1∑n−1f(xi))
der xi=a+iΔx
For å forstå dette monsteret av en funksjon, må vi først vite at det er en enklere funksjon en kan bruke:
∫abf(x)dx≈2Δx(i=1∑nf(xi)+f(xi−1))
Men at denne kan omformuleres til formelen i hovedboksen
Fordi f(x0)=f(a) og f(xn)=f(b)
Samtidig som vi ser at alle andre xi=x0∨xn summeres dobbelt opp. Derfor får man formelen i hovedboksen.
Hvis du lurer på hvor 2Δx(f(xi)+f(xi±1)) kommer ifra er det fra funksjonen for arealet av et trapes:
A=2(a+b)⋅h
Hvor h=Δx er høyden mellom sidene.
Hvor a=f(xi)∧b=(fx±i) Gir:
Ti=2Δx(f(xi)+f(xi±1))
Og fordi vi summerer sammen mange Ti settes 'konstanten' 2Δx utenfor
Gjennomsnittsverdi av en funksjon i et intervall med bruk av et bestemt integral
Gjennomsnittsverdi bestemt integral
Gjennomsnittsverdien T av en funksjon f(x) i et intervall [a, b] er gitt ved
Tˉ=b−a1∫abf(x)dx
f(x) er høyden til figuren i et gitt punkt
[a,b] beskriver lengden til figuren (langs x-aksen)
Og fordi integralet beskriver areal,
Så kan man dele på lengden (b-a) og sitte igjen med gjennomsnittshøyden.
Buelengde til funksjon i intervall
Buelengde
s=∫ab1+(f′(x))2dx
Ved å summere sammen alle hypotenusene til katetene (Δx) og forskjell i y får vi buelengde.
For å finne formelen må vi starte med å finne en liten buelengde:
Δsi=(Δx)2+(Δf(xi))2Δsi=Δx2(1+(ΔxΔf(xi))2)Δsi=1(f′(x))2⋅Δx
Ved å summere sammen veldig mange små buelengder i et intervall, sitter vi igjen med formelen for buelengde!
Det ubestemte integralet
K(x) står får den antideriverte, som også er det integrering er
∫f(x)dx=K(x)+C,
der
K′(x)=f(x)
og
C∈R
Integrasjonregel: konstant faktor
En konstant faktor blir uendret ved integrasjon:
∫k⋅u(x)dx=k∫u(x)dx(k∈R)
Integrasjonregel: flere utrykk
Flerleddet utrykk som integreres kan oppspaltes:
∫(u(x)±v(x))dx=∫u(x)dx±∫v(x)dx
Integrasjonregel: potenser
Generelt kan vi integrere potensen:
∫xrdx=r+11xr+1+C(r=−1)
La F være en antiderivert av f slik at F'(x)=f(x).
∫abf(x)dx=[F(x)]ab=F(b)−F(a)
Integrasjonsmetode: delvis integrasjon
∫u′⋅vdx=u⋅v−∫u⋅v′dx∫u⋅v′dx=u⋅v−∫u′⋅vdx
Integrasjonsmetode: variabelskifte
Metode for substitusjon
Velg en kjerne u
Finn u'
Erstatt dx med u′du
Forenkle slikt at kun u består (er dette ikke mulig fungerer ikke metoden)
Integrer med u som variabel
Sett inn for u, slik at svaret blir en funksjon av x
Integrasjonsmetode: delbrøkoppspalting
Metoden:
La P og Q være polynomfunksjoner med grad p og q. Slik at p < q Er derimot p>q må polynomdivisjon gjøres først!
Da kan brøken Q(x)P(x) skrives som en sum av q delbrøker.
Summen til integralene av delbrøkene må derfor være lik: ∫Q(x)P(x)dx
Eksempel delbrøkoppspalting
∫9x2−14dx⟹∫(3x+1−2+3x−12)dx=32ln3x+13x−1+C
Benytter oss av delbrøkoppspalting for å forenkle utrykket
9x2−14=3x+1A+3x−1B9x2−14=(3x+1)(3x−1)A+(3x−1)(3x+1)B9x2−14=(3x+1)(3x−1)A(3x−1)+(3x−1)(3x+1)B(3x+1)4=A(3x−1)+B(3x+1)
Setter inn for x slik at vi finner A og B (alene) x=−31⟹4=A(−1−1)+B(−1+1)⟹A=−2 x=31⟹4=A(1−1)+B(1+1)⟹B=2
Setter dette inn i integralet
∫(3x+1A+3x−1B)dx=∫(3x+1−2+3x−12)dx=−32ln∣3x+1∣+32ln∣3x−1∣+C=32ln3x+13x−1+C
Er du usikker på siste linje? Så snur man leddene, så ser man at logaritmesetningen om ln(a)-ln(b)=ln(a/b) benyttes
Volum av omdreiningslegemer
La f være en kontinuerlig funksjon i intervallet [a,b]
Dreier vi grafen 360°(2π rad) om x-aksen får vi volumet:
V=πr2=π∫ab(f(x))2dx
Areal av omdreiningslegemer
La f være en kontinuerlig og integrerbar funksjon i intervallet [a,b]
Dreier vi grafen 360°(2π rad) om x-aksen får vi arealet:
A=2π∫abf(x)1+(f′(x))2dxMerk: at vi bruker buelengde for å finne arealet!
Omdreiningslegemer rundt y-aksen
V=π∫cd(g(y))2dyA=2π∫cdg(y)1+(g′(y))2dy
Der g er den omvendte funksjonen til f, c=f(a) og d=f(b)
Som betyr at man kan skrive følgene om en har f(x):
V=π∫f(a)f(b)(f−1(x))2dx
3 Trigonometri
Radianer (det absolutte vinkelmålet)
Vinkel v målt i radianer er lik forholdet mellom buelengden b og radien r.
v=rb
Omgjøring fra grader til radianer og motsatt
Vinkelen n° er ekvivalent med radianen v så er:
v=180°n°⋅πogn°=πv⋅180°
For sinus:sin2v=2sinv⋅cosvFor cosinus:cos2v=cos2v−sin2v=1−2sin2v=2cos2v−1For tangens:tan2v=1−tan2v2tanv
Harmoniske svingninger
f(x)=Asin(cx+φ)+d
Sinusargumentet cx+φ
Vi antar at c og φ er positive
d
likevektslinja (y=d) ligger midt i mellom topp og bunnpunktet til sinusfunksjonen.
Vi har derfor y=d, der d=2ymaks+ymin
A
Ampliduten (A) er avstanden fra topppunktet (eller bunnpunktet) til likevektslinja y = d. Kalles også maksimalt utslag
Derfor er A=2ymaks−ymin
c
Perioden p til en harmonisk svingning er avstanden mellom to punkter der grafen gjentar seg selv. Eksempel to topp- eller bunnpunkter.
Når x = 0, er sinusargumentet φ
Etter én periode er sinusargumentet lik φ+2π. Da skal x ha verdien p.
Det gir cp+φ=φ+2π⇔c=p2π
φ
Representerer hvor mye sinusfunksjonen er forskjøvet fordi sin(x) når x er 0 gir 0. Mens sin(x+φ) når x er 0 og φ er π/2 gir verdien 1 da er grafen altså forskjøvet med 90°
Alternativ forklaring er at etter likevektslinja antar vi at sinusfunksjonen stiger oppover i x0 = 0. Da er y = d, så sinusargumentet kan være lik null.
Det gir cx0+φ=0⇔c=p2π⇔φ=−x0c
Derfor er grafen til A sin (cx + φ) + d forskjøvet x0 langs likevektslinja sammenlignet med A sin (cx) + d.
Grafen er forskjøvet mot høyre når φ<0 og x0 er positiv. Helt motsatt når grafen er forskjøvet mot venstre. (φ>0 og x0 er negativ)
Sinusfunksjonen f gitt ved f(x)=Asin(cx+φ) gir den samme grafen som cosinusfuksjonen g
g(x)=Acos(cx+θ)+d, der θ=φ−2π
(fordi sinusfunksjonen forskjøvet ved 90° overlapper med cosinusfuksjonen)
Gjøre om til Sinus
asincx+bcoscx=Asin(cx+φ)der A=a2+b2 og tanφ=baφ ligger i samme kvadrant som punket (a,b).
(s.236 kjerneregel ved konstant inni trig.funksjon)
Integrasjon av trigonometriske funksjoner
∫sinxdx=−cosx+C∫cosxdx=sinx+C
(s.241 kjerneregel ved konstant inni trig.funksjon)
4 Modeller (s.300)
Regresjon
Analyse av modeller
Veksmodeller
Eulermetoden♥
Beskrivelse/ formell definisjon
Gitt to første ordens differensialligning f og g
{dtdx=f(x,y,t)dtdy=g(x,y,t)
som beskriver en kurve [x(t),y(t)]. Eulers metode består i å velge en initialverdi,
(x0,y0) og en steglengde h.
Så beregnes videre det en følge av punkter
xn+1,yn+1=(xn+hf(xn,yn,tn),yn+hg(xn,yn,tn))
Hvor tn=nh. Denne punktfølgen beskriver en approksimasjon av kurven
[(x(t),y(t))] med initialbetingesle [(x(0),y(0))]=(x0,y0)
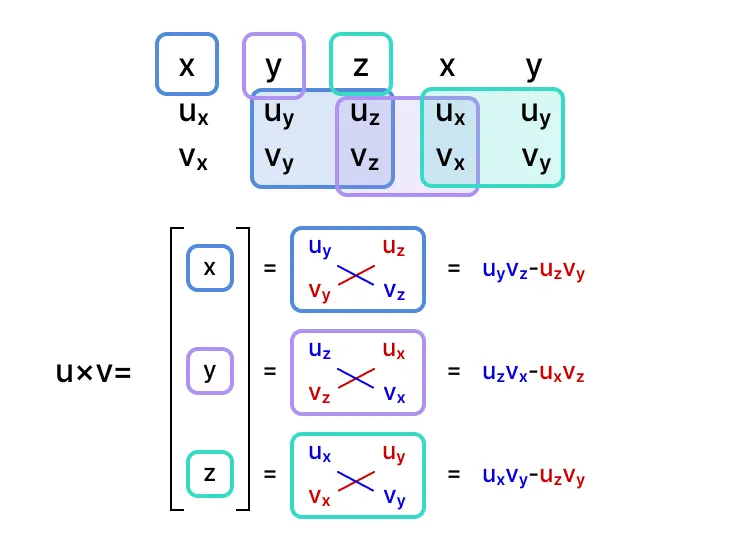
Vektorproduktet representerer en vektor som er ortogonal med begge vektorene den er definert med sine lengder som òg tilsvarer arealet til paralellogrammet vektorene utspenner
u×v=[y1z2−z1y2,z1x2−x1z2,x1y2−y1x2]Tips sett opp skjema under med x, y, z, x, y på toppen når du regner for hånd Formelt er vektorproduktet definert slikt:
u×v=∣u∣⋅∣v∣sin(θ)n
Hvor θ er vinkelen mellom u og v (0° til 180°) og n er en normalisert vektor som er ortogonal på både u og v
Her skjønner vi også hvorfor u×v=0⟺u⊥v
som selfølgelig er fordi sin(0°) og sin(180°) er 0
Utlede vektorproduket
u×v=[y1z2−z1y2,z1x2−x1z2,x1y2−y1x2] Også definert med den formelle determinantenc=u×vc=detexx1x2eyy1y2ezz1z2c=ex⋅y1y2z1z2−ey⋅x1x2z1z2+ex⋅x1x2y1y2c=ex⋅∣y1z2−z1y2∣−ey⋅∣x1z2−z1x2∣+ex⋅∣x1y2−y1x2∣
De to nederste linjene er gjenkjennbare i «Trond metoden» hvor man ganger oppe fra venstre til nede til høyre så subtraherer det som er oppe til høyre ganger nede til venstre.
En fordel med å ikke bruke determinanten er minusen på ey som følge av at den «mangler plass» eller må ta fra både venstre og høyre kolonne av seg selv.
Derfor anbefales det sterkt av meg personlig å sette opp skjemaet.
Lagranges identitet...
Fordi ingen ønsker å se utredelsen til identiteten, skriver jeg den kun ned.
∣u×u∣=∣u∣⋅∣u∣⋅sinθ
Men... derimot kan man se den ligner den formelle definisjonen ;)
En rett linje ℓ som går gjennom P(x0,y0,z0)
or har retningsvektoren [a,b,c] beskrives
ℓ:⎩⎨⎧x=x0+aty=y0+btz=z0+ct
To linjer i rommet kan kun være:
være parallelle, men ikke sammenfallende
være parallelle og sammenfallende
være vindskeive (treffer aldri)
skjøre hverandre i ett punkt
Treffer to linjer?
Undersøk hvordan linjene ligger i forhold til hverandre
ℓ:⎩⎨⎧x=1+2ty=5+3tz=5+tm:⎩⎨⎧x=−2ty=5−3tz=3−tn:⎩⎨⎧x=1+ty=6+2tz=−2−3t
ℓ og m er parallelle men skjærer ikke hverandre
ℓ og n skjærer hverandre i (-1,2,4)
Finner vi at m og n er vindskjeive.
Vi starter med å finne retningsvektorene rℓ=[2,3,1], rm=[−2,−3,−1] og rn=[1,2,−3]
På grunn av rℓ=−rm er rℓ∥rm. Altså ℓ og m er parallelle
For å sjekke om linjene er sammenfallende sjekker vi om begge linjene har samme punkt. Vi starter men et kjent punkt på ℓ eksempel (1,5,5).
Vi sjekker om dette punktet også er på m ved å sette z lik hverandre: m(−2)=(4,11,5)=(1,5,5) da kun z-kordinated er likt.
Ergo ℓ og m er parallelle men ikke sammenfallende
For å sjekke om to ikke parallelle linjer treffer hverandre setter man opp et likninssystem for med 3 linjer. Eksempel for ℓ og n
⎩⎨⎧I:II:III:1+2t=1+s5+3t=6+2s5+t=−2−3s
Likning III gir t=-7-3s Vi setter inn i I og II:
{I:II:1+2(−7−3s)=1+s5+3(−7−3s)=6+2s⟺s=−2⟺s=−2
Siden vi fikk samme verdi av s, skjærer ℓ og m hverandre. Vi setter inn -2 for ℓ eller m og finner skjæringspunktet (-1,2,4) ℓ og m skjærer hveradnre i punktet (-1,2,4)
Vi bruker samme metode for m og n, som gir likninssystemet:
⎩⎨⎧I:II:III:−2t=1+s5−3t=6+2s3−t=−2−3s
Likning III gir t=5+3s. Som vi setter inn i I og II:
{I:II:−2(5+3s)=1+s5−3(5+3s)=6+2s⟺s=−11/7⟺s=−16/11Siden s-verdiene ikke er like, skjærer ikke m og n. Altså de er altså vindskeive.
Parameterframstilling: for kurver
r(t)=[x(t),y(t),z(t)]
Matte, men egentlig fysikk (akselerasjon)
La t være en parameter for tid, og r en posisjonsvektoren
Så er sammenhengen mellom akselerasjon, fart og posisjon:
a(t)=v′(t)=r′′(t)
Definisjon plan
Et plan er en flate som ikke krummer i rommet. Og kan beskrives:
ax+by+cz=d
Et plan er kun definert med disse likestilte opplysningene:
tre punkter som ikke ligger på èn linje
et punkt og to ikke-parallelle vekotrer
et punkt og en normalvektor
Definere et plan med punkt og normalvektor
Et plan som går gjennom punktet (x0,y0,z0) og normalvektoren [a,b,c].
a(x−x0)+b(y−y0)+c(z−z0)=0
Som blir likningen til planet
Hvorfor holder kun den formelen?
Fordi a(x−x0)+b(y−y0)+c(z−z0)=0 kan brukes ved alle tilfeller med tilstrekkelig informasjon! (3 punkt og to ikke-parallelle vektorer)
La oss ta for oss lista nedenfor for å vise at ved alle tilfellene kan vi lage likningen til planet definert av dem.
tre punkter som ikke ligger på èn linje
et punkt og to ikke-parallelle vekotrer
et punkt og en normalvektor (basisen, allerede løst)
Med «tre punkter som ikke ligger på èn linje» gjør vi følgene. Lager to forskjellige vektorer med punktene. Tar vektorproduktet av dem for å finne normalvektoren. Så har vi minst et punkt og normalvektor.
Med «et punkt og to ikke-parallelle vekotrer» tar vi kun vektorproduket av vektorene for å finne normalvektor. Så har vi minst et punkt og normalvektor.
Parameterframstilling for plan
Et plan α går gjennom punket (x0,y0,z0) og er parallelt med de to ikke parallelle vektorene [a1,b1,c1] og [a2,b2,c2]. Gir parameterframstillingen:
α:⎩⎨⎧x=x0+a1s+a2ty=y0+b1s+b2tz=z0+c1s+c2t
utredning? (s. 353)
Skjæring mellom plan (parameterframstilling)
Skjæringslinje mellom to plan
Gitt planene α og β
α:β:x+y−z+1=03x−3y+z+3=0
Forklar hvorfor skjæringslinja ℓ skjærer α og β
ℓ:⎩⎨⎧x=ty=4+4tz=5+5t
Vi starter med å finne et felles punkt for planene α og β siden det blir et kjent punkt for skjæringslinja.
Vi bruker x = 0 for å finne y og z kordinatene som oppfyller planlikningene.
{α:β:y−z+1=0−2y+z+3=0
Vi adderer likningene og får −y+4=0⟹y=4 og setter y=4 i første likning
1(4)−z+1=0⟹z=5. Dette gir punktet (0, 4, 5)
Normalvektorene til planene er nα=[1,1−1]∨nβ=[3,−2,1]nα×nβ=[−1,−4,−5]=−1⋅[1,4,5]
Vi har da et kjent punkt på skjæringslinja (0, 4, 5) og en vektor [1,4,5] som står normalt på begge planene (må være parallell med skjæringslinja). Det er nok til å definere en parameterframstilling.
Vinkler mellom to linjer
Vinkelen v mellom to linjer skal ligge i intervallet [0°, 90°]
La vinkelen u være vinklen mellom retningsvektorene. Det betyr
v=u hvis 0°≤u≤90°v=180°−u hvis 90°≤u≤180°
Vinkler mellom to plan
Vinkelen v mellom to plan skal ligge i intervallet [0°, 90°]
La vinkelen u være vinklen mellom normalvektorene for planene. Det betyr
v=u hvis 0°≤u≤90°v=180°−u hvis 90°≤u≤180°
Vinkler mellom linje og plan
Vinkelen v mellom en linje og et plan skal ligge i intervallet [0°, 90°]
La vinkelen u være vinklen mellom en retningsvektor (linje) og normalvektor (planet). Det betyr
v=90°−u hvis 0°≤u≤90°v=u−90° hvis 90°≤u≤180°
Avstander
Avstand linje - punkt
La r være retningsvektoren til en linje gjennom P.
Avstanden blir D mellom et punkt Q og linja (gitt ved P og r)
D=∣r∣∣PQ×r∣
Avstand plan - punkt
Et plan med ax + by + cz + d = 0.
Gir avstanden D mellom punket (x1,y1,z1) og planet:
D=a2+b2+c2∣ax1+byz+cz1+d∣
Avstanden mellom punkt og linje(s.368)
Eksempel kommer!
Avstanden mellom to linjer(s.370)
Eksempel kommer!
Avstanden mellom punkt og plan(s.372)
Eksempel kommer!
Avstanden mellom linje og plan(s.34)
Eksempel kommer!
Avstanden mellom to plan(s.375)
Eksempel kommer!
Likning til kuleflate
En kule med sentrum i (x0,y0,z0) og radius r. Gir
(x−x0)2+(y−y0)2+(z−z0)2=r2
som likningen til kuleflata.
Parameterframstilling til kuleflate
Parameterframstillingen for en kuleflate K med sentrum i origo og radius r er gitt ved:
K:⎩⎨⎧x=r⋅cosB⋅cosLy=r⋅cosB⋅sinLz=r⋅sinB
der B∈[−90°,90°]
og L∈⟨−180°,180°].